Note
Go to the end to download the full example code.
Noisy Black-Box Optimization#
Author(s): Romain Egele.
In this tutorial, we show you how to manage noisy black-box optimization (Wikipedia) (a.k.a., derivative-free optimization) with DeepHyper.
Black-box optimization is a field of optimization research where an objective function \(f(x) = y \in \mathbb{R}\) is optimized only based on input-output observations \(\{ (x_1,y_1), \ldots, (x_n, y_n) \}\).
Let’s start by installing DeepHyper!
%%bash
pip install deephyper
Optimization Problem#
The optimization problem consists of two components:
The black-box function that we aim to optimize.
The search space (or domain) of input variables over which the optimization is performed.
Black-Box Function#
In DeepHyper, black-box optimization is performed on user-defined functions that can be noisy or stochastic. Below, we define a noisy black-box function f that depends on a single variable \(x\) in the domain \(I_x = [-10, 10]\).
The noisy black-box function is defined as:
where the probability of success is:
This means that for each evaluation, f(x) returns a random binary value (0 or 1) with probability p(x) of success. The maximum expected value of \(f(x)\) is obtained at \(x = 0\), where \(p(0) = 1\).
The function f takes as input a job, which behaves like a dictionary. The variable of interest x is accessed via job.parameters[“x”].
import numpy as np
def f(job):
p = (100 - job.parameters["x"] ** 2) / 100
obs = np.random.binomial(n=1, p=p)
return obs
Search Space of Input Variables#
In this example, we have only one variable \(x\) for the black-box functin \(f\). We empirically decide to optimize this variable $x$ on the interval \(I_x = [-10;10]\). To do so we use the deephyper.hpo.HpProblem from DeepHyper and add a real hyperparameter by using a tuple of two floats.
from deephyper.hpo import HpProblem
problem = HpProblem()
# Define the variable you want to optimize
problem.add_hyperparameter((-10.0, 10.0), "x")
problem
Configuration space object:
Hyperparameters:
x, Type: UniformFloat, Range: [-10.0, 10.0], Default: 0.0
Evaluator Interface#
DeepHyper uses an API called deephyper.evaluator.Evaluator to distribute the computation of black-box functions and adapt to different backends (e.g., threads, processes, MPI, Ray). An Evaluator object wraps the black-box function f that we want to optimize. Then a method parameter is used to select the backend and method_kwargs defines some available options of this backend.
Hint
The method="thread" provides parallel computation only if the black-box is releasing the global interpretor lock (GIL). Therefore, if you want parallelism in Jupyter notebooks you should use the Ray evaluator (method="ray") after installing Ray with pip install ray.
It is possible to define callbacks to extend the behaviour of Evaluator each time a function-evaluation is launched or completed. In this example we use the deephyper.evaluator.callback.TqdmCallback to follow the completed evaluations and the evolution of the objective with a progress-bar.
from deephyper.evaluator import Evaluator
from deephyper.evaluator.callback import TqdmCallback
# define the evaluator to distribute the computation
evaluator = Evaluator.create(
f,
method="thread",
method_kwargs={
"num_workers": 1,
"callbacks": [TqdmCallback()]
},
)
print(f"Evaluator has {evaluator.num_workers} available worker{'' if evaluator.num_workers == 1 else 's'}")
Evaluator has 1 available worker
Search Algorithm#
The next step is to define the search algorithm that we want to use. Here, we choose deephyper.hpo.CBO (Centralized Bayesian Optimization) which is a sampling based Bayesian optimization strategy.
This algorithm has the advantage of being asynchronous which is crutial to keep a good utilization of the resources when the number of available workers increases.
We also choose, how to optimize the acquisition function of the Bayesian optimization with "ga" (i.e., continuous Genetic Algorithm).
Then, we setup a solution selection method. Here we use deephyper.hpo.ArgMaxEstSelection, that will select the optimum based on the estimated maximum of a surrogate model.
The model_grid_search=True activates the auto-tuning of the surrogate model every 100 observations by default.
The noisy_objective=True sets the default configuration of the surrogate model for a noisy objective.
from deephyper.hpo import CBO, ArgMaxEstSelection
def create_search():
search = CBO(
problem,
acq_optimizer="ga",
solution_selection=ArgMaxEstSelection(
problem,
model_grid_search=True,
noisy_objective=True,
),
)
return search
max_evals = 300
search = create_search()
results = search.search(evaluator, max_evals)
Results file already exists, it will be renamed to /Users/rp5/Documents/DeepHyper/deephyper/examples/examples_bbo/results_20251021-154659.csv
0%| | 0/300 [00:00<?, ?it/s]
0%| | 1/300 [00:00<00:00, 6250.83it/s, failures=0, objective=1]
1%| | 2/300 [00:00<01:27, 3.40it/s, failures=0, objective=1]
1%| | 2/300 [00:00<01:27, 3.40it/s, failures=0, objective=1]
1%| | 3/300 [00:01<02:01, 2.45it/s, failures=0, objective=1]
1%| | 3/300 [00:01<02:01, 2.45it/s, failures=0, objective=1]
1%|▏ | 4/300 [00:01<02:38, 1.87it/s, failures=0, objective=1]
1%|▏ | 4/300 [00:01<02:38, 1.87it/s, failures=0, objective=1]
2%|▏ | 5/300 [00:02<02:54, 1.70it/s, failures=0, objective=1]
2%|▏ | 5/300 [00:02<02:54, 1.70it/s, failures=0, objective=1]
2%|▏ | 6/300 [00:03<03:03, 1.60it/s, failures=0, objective=1]
2%|▏ | 6/300 [00:03<03:03, 1.60it/s, failures=0, objective=1]
2%|▏ | 7/300 [00:03<03:09, 1.54it/s, failures=0, objective=1]
2%|▏ | 7/300 [00:03<03:09, 1.54it/s, failures=0, objective=1]
3%|▎ | 8/300 [00:04<03:18, 1.47it/s, failures=0, objective=1]
3%|▎ | 8/300 [00:04<03:18, 1.47it/s, failures=0, objective=1]
3%|▎ | 9/300 [00:05<03:20, 1.45it/s, failures=0, objective=1]
3%|▎ | 9/300 [00:05<03:20, 1.45it/s, failures=0, objective=1]
3%|▎ | 10/300 [00:06<03:20, 1.44it/s, failures=0, objective=1]
3%|▎ | 10/300 [00:06<03:20, 1.44it/s, failures=0, objective=1]
4%|▎ | 11/300 [00:06<03:20, 1.44it/s, failures=0, objective=1]
4%|▎ | 11/300 [00:06<03:20, 1.44it/s, failures=0, objective=1]
4%|▍ | 12/300 [00:07<03:24, 1.41it/s, failures=0, objective=1]
4%|▍ | 12/300 [00:07<03:24, 1.41it/s, failures=0, objective=1]
4%|▍ | 13/300 [00:08<03:22, 1.41it/s, failures=0, objective=1]
4%|▍ | 13/300 [00:08<03:22, 1.41it/s, failures=0, objective=1]
5%|▍ | 14/300 [00:08<03:21, 1.42it/s, failures=0, objective=1]
5%|▍ | 14/300 [00:08<03:21, 1.42it/s, failures=0, objective=1]
5%|▌ | 15/300 [00:09<03:25, 1.38it/s, failures=0, objective=1]
5%|▌ | 15/300 [00:09<03:25, 1.38it/s, failures=0, objective=1]
5%|▌ | 16/300 [00:10<03:23, 1.40it/s, failures=0, objective=1]
5%|▌ | 16/300 [00:10<03:23, 1.40it/s, failures=0, objective=1]
6%|▌ | 17/300 [00:11<03:21, 1.40it/s, failures=0, objective=1]
6%|▌ | 17/300 [00:11<03:21, 1.40it/s, failures=0, objective=1]
6%|▌ | 18/300 [00:11<03:20, 1.40it/s, failures=0, objective=1]
6%|▌ | 18/300 [00:11<03:20, 1.40it/s, failures=0, objective=1]
6%|▋ | 19/300 [00:12<03:23, 1.38it/s, failures=0, objective=1]
6%|▋ | 19/300 [00:12<03:23, 1.38it/s, failures=0, objective=1]
7%|▋ | 20/300 [00:13<03:21, 1.39it/s, failures=0, objective=1]
7%|▋ | 20/300 [00:13<03:21, 1.39it/s, failures=0, objective=1]
7%|▋ | 21/300 [00:14<03:19, 1.40it/s, failures=0, objective=1]
7%|▋ | 21/300 [00:14<03:19, 1.40it/s, failures=0, objective=1]
7%|▋ | 22/300 [00:14<03:16, 1.42it/s, failures=0, objective=1]
7%|▋ | 22/300 [00:14<03:16, 1.42it/s, failures=0, objective=1]
8%|▊ | 23/300 [00:15<03:20, 1.38it/s, failures=0, objective=1]
8%|▊ | 23/300 [00:15<03:20, 1.38it/s, failures=0, objective=1]
8%|▊ | 24/300 [00:16<03:18, 1.39it/s, failures=0, objective=1]
8%|▊ | 24/300 [00:16<03:18, 1.39it/s, failures=0, objective=1]
8%|▊ | 25/300 [00:16<03:15, 1.40it/s, failures=0, objective=1]
8%|▊ | 25/300 [00:16<03:15, 1.40it/s, failures=0, objective=1]
9%|▊ | 26/300 [00:17<03:14, 1.41it/s, failures=0, objective=1]
9%|▊ | 26/300 [00:17<03:14, 1.41it/s, failures=0, objective=1]
9%|▉ | 27/300 [00:18<03:18, 1.38it/s, failures=0, objective=1]
9%|▉ | 27/300 [00:18<03:18, 1.38it/s, failures=0, objective=1]
9%|▉ | 28/300 [00:19<03:15, 1.39it/s, failures=0, objective=1]
9%|▉ | 28/300 [00:19<03:15, 1.39it/s, failures=0, objective=1]
10%|▉ | 29/300 [00:19<03:12, 1.40it/s, failures=0, objective=1]
10%|▉ | 29/300 [00:19<03:12, 1.40it/s, failures=0, objective=1]
10%|█ | 30/300 [00:20<03:10, 1.42it/s, failures=0, objective=1]
10%|█ | 30/300 [00:20<03:10, 1.42it/s, failures=0, objective=1]
10%|█ | 31/300 [00:21<03:14, 1.38it/s, failures=0, objective=1]
10%|█ | 31/300 [00:21<03:14, 1.38it/s, failures=0, objective=1]
11%|█ | 32/300 [00:21<03:11, 1.40it/s, failures=0, objective=1]
11%|█ | 32/300 [00:21<03:11, 1.40it/s, failures=0, objective=1]
11%|█ | 33/300 [00:22<03:09, 1.41it/s, failures=0, objective=1]
11%|█ | 33/300 [00:22<03:09, 1.41it/s, failures=0, objective=1]
11%|█▏ | 34/300 [00:23<03:09, 1.41it/s, failures=0, objective=1]
11%|█▏ | 34/300 [00:23<03:09, 1.41it/s, failures=0, objective=1]
12%|█▏ | 35/300 [00:24<03:12, 1.38it/s, failures=0, objective=1]
12%|█▏ | 35/300 [00:24<03:12, 1.38it/s, failures=0, objective=1]
12%|█▏ | 36/300 [00:24<03:10, 1.39it/s, failures=0, objective=1]
12%|█▏ | 36/300 [00:24<03:10, 1.39it/s, failures=0, objective=1]
12%|█▏ | 37/300 [00:25<03:09, 1.39it/s, failures=0, objective=1]
12%|█▏ | 37/300 [00:25<03:09, 1.39it/s, failures=0, objective=1]
13%|█▎ | 38/300 [00:26<03:07, 1.40it/s, failures=0, objective=1]
13%|█▎ | 38/300 [00:26<03:07, 1.40it/s, failures=0, objective=1]
13%|█▎ | 39/300 [00:26<03:10, 1.37it/s, failures=0, objective=1]
13%|█▎ | 39/300 [00:26<03:10, 1.37it/s, failures=0, objective=1]
13%|█▎ | 40/300 [00:27<03:06, 1.39it/s, failures=0, objective=1]
13%|█▎ | 40/300 [00:27<03:06, 1.39it/s, failures=0, objective=1]
14%|█▎ | 41/300 [00:28<03:04, 1.40it/s, failures=0, objective=1]
14%|█▎ | 41/300 [00:28<03:04, 1.40it/s, failures=0, objective=1]
14%|█▍ | 42/300 [00:29<03:03, 1.41it/s, failures=0, objective=1]
14%|█▍ | 42/300 [00:29<03:03, 1.41it/s, failures=0, objective=1]
14%|█▍ | 43/300 [00:29<03:05, 1.38it/s, failures=0, objective=1]
14%|█▍ | 43/300 [00:29<03:05, 1.38it/s, failures=0, objective=1]
15%|█▍ | 44/300 [00:30<03:03, 1.39it/s, failures=0, objective=1]
15%|█▍ | 44/300 [00:30<03:03, 1.39it/s, failures=0, objective=1]
15%|█▌ | 45/300 [00:31<03:02, 1.40it/s, failures=0, objective=1]
15%|█▌ | 45/300 [00:31<03:02, 1.40it/s, failures=0, objective=1]
15%|█▌ | 46/300 [00:31<03:00, 1.40it/s, failures=0, objective=1]
15%|█▌ | 46/300 [00:31<03:00, 1.40it/s, failures=0, objective=1]
16%|█▌ | 47/300 [00:32<03:02, 1.38it/s, failures=0, objective=1]
16%|█▌ | 47/300 [00:32<03:02, 1.38it/s, failures=0, objective=1]
16%|█▌ | 48/300 [00:33<03:01, 1.38it/s, failures=0, objective=1]
16%|█▌ | 48/300 [00:33<03:01, 1.38it/s, failures=0, objective=1]
16%|█▋ | 49/300 [00:34<03:00, 1.39it/s, failures=0, objective=1]
16%|█▋ | 49/300 [00:34<03:00, 1.39it/s, failures=0, objective=1]
17%|█▋ | 50/300 [00:34<02:57, 1.41it/s, failures=0, objective=1]
17%|█▋ | 50/300 [00:34<02:57, 1.41it/s, failures=0, objective=1]
17%|█▋ | 51/300 [00:35<03:01, 1.37it/s, failures=0, objective=1]
17%|█▋ | 51/300 [00:35<03:01, 1.37it/s, failures=0, objective=1]
17%|█▋ | 52/300 [00:36<02:58, 1.39it/s, failures=0, objective=1]
17%|█▋ | 52/300 [00:36<02:58, 1.39it/s, failures=0, objective=1]
18%|█▊ | 53/300 [00:36<02:56, 1.40it/s, failures=0, objective=1]
18%|█▊ | 53/300 [00:36<02:56, 1.40it/s, failures=0, objective=1]
18%|█▊ | 54/300 [00:37<02:55, 1.40it/s, failures=0, objective=1]
18%|█▊ | 54/300 [00:37<02:55, 1.40it/s, failures=0, objective=1]
18%|█▊ | 55/300 [00:38<02:57, 1.38it/s, failures=0, objective=1]
18%|█▊ | 55/300 [00:38<02:57, 1.38it/s, failures=0, objective=1]
19%|█▊ | 56/300 [00:39<02:55, 1.39it/s, failures=0, objective=1]
19%|█▊ | 56/300 [00:39<02:55, 1.39it/s, failures=0, objective=1]
19%|█▉ | 57/300 [00:39<02:53, 1.40it/s, failures=0, objective=1]
19%|█▉ | 57/300 [00:39<02:53, 1.40it/s, failures=0, objective=1]
19%|█▉ | 58/300 [00:40<02:56, 1.37it/s, failures=0, objective=1]
19%|█▉ | 58/300 [00:40<02:56, 1.37it/s, failures=0, objective=1]
20%|█▉ | 59/300 [00:41<02:53, 1.39it/s, failures=0, objective=1]
20%|█▉ | 59/300 [00:41<02:53, 1.39it/s, failures=0, objective=1]
20%|██ | 60/300 [00:42<02:51, 1.40it/s, failures=0, objective=1]
20%|██ | 60/300 [00:42<02:51, 1.40it/s, failures=0, objective=1]
20%|██ | 61/300 [00:42<02:49, 1.41it/s, failures=0, objective=1]
20%|██ | 61/300 [00:42<02:49, 1.41it/s, failures=0, objective=1]
21%|██ | 62/300 [00:43<02:54, 1.37it/s, failures=0, objective=1]
21%|██ | 62/300 [00:43<02:54, 1.37it/s, failures=0, objective=1]
21%|██ | 63/300 [00:44<02:51, 1.38it/s, failures=0, objective=1]
21%|██ | 63/300 [00:44<02:51, 1.38it/s, failures=0, objective=1]
21%|██▏ | 64/300 [00:44<02:49, 1.40it/s, failures=0, objective=1]
21%|██▏ | 64/300 [00:44<02:49, 1.40it/s, failures=0, objective=1]
22%|██▏ | 65/300 [00:45<02:46, 1.41it/s, failures=0, objective=1]
22%|██▏ | 65/300 [00:45<02:46, 1.41it/s, failures=0, objective=1]
22%|██▏ | 66/300 [00:46<02:51, 1.37it/s, failures=0, objective=1]
22%|██▏ | 66/300 [00:46<02:51, 1.37it/s, failures=0, objective=1]
22%|██▏ | 67/300 [00:47<02:49, 1.38it/s, failures=0, objective=1]
22%|██▏ | 67/300 [00:47<02:49, 1.38it/s, failures=0, objective=1]
23%|██▎ | 68/300 [00:47<02:46, 1.39it/s, failures=0, objective=1]
23%|██▎ | 68/300 [00:47<02:46, 1.39it/s, failures=0, objective=1]
23%|██▎ | 69/300 [00:48<02:45, 1.39it/s, failures=0, objective=1]
23%|██▎ | 69/300 [00:48<02:45, 1.39it/s, failures=0, objective=1]
23%|██▎ | 70/300 [00:49<02:50, 1.35it/s, failures=0, objective=1]
23%|██▎ | 70/300 [00:49<02:50, 1.35it/s, failures=0, objective=1]
24%|██▎ | 71/300 [00:50<02:46, 1.38it/s, failures=0, objective=1]
24%|██▎ | 71/300 [00:50<02:46, 1.38it/s, failures=0, objective=1]
24%|██▍ | 72/300 [00:50<02:43, 1.39it/s, failures=0, objective=1]
24%|██▍ | 72/300 [00:50<02:43, 1.39it/s, failures=0, objective=1]
24%|██▍ | 73/300 [00:51<02:45, 1.37it/s, failures=0, objective=1]
24%|██▍ | 73/300 [00:51<02:45, 1.37it/s, failures=0, objective=1]
25%|██▍ | 74/300 [00:52<02:43, 1.39it/s, failures=0, objective=1]
25%|██▍ | 74/300 [00:52<02:43, 1.39it/s, failures=0, objective=1]
25%|██▌ | 75/300 [00:52<02:41, 1.39it/s, failures=0, objective=1]
25%|██▌ | 75/300 [00:52<02:41, 1.39it/s, failures=0, objective=1]
25%|██▌ | 76/300 [00:53<02:40, 1.40it/s, failures=0, objective=1]
25%|██▌ | 76/300 [00:53<02:40, 1.40it/s, failures=0, objective=1]
26%|██▌ | 77/300 [00:54<02:43, 1.37it/s, failures=0, objective=1]
26%|██▌ | 77/300 [00:54<02:43, 1.37it/s, failures=0, objective=1]
26%|██▌ | 78/300 [00:55<02:40, 1.38it/s, failures=0, objective=1]
26%|██▌ | 78/300 [00:55<02:40, 1.38it/s, failures=0, objective=1]
26%|██▋ | 79/300 [00:55<02:38, 1.40it/s, failures=0, objective=1]
26%|██▋ | 79/300 [00:55<02:38, 1.40it/s, failures=0, objective=1]
27%|██▋ | 80/300 [00:56<02:36, 1.40it/s, failures=0, objective=1]
27%|██▋ | 80/300 [00:56<02:36, 1.40it/s, failures=0, objective=1]
27%|██▋ | 81/300 [00:57<02:39, 1.37it/s, failures=0, objective=1]
27%|██▋ | 81/300 [00:57<02:39, 1.37it/s, failures=0, objective=1]
27%|██▋ | 82/300 [00:57<02:36, 1.39it/s, failures=0, objective=1]
27%|██▋ | 82/300 [00:57<02:36, 1.39it/s, failures=0, objective=1]
28%|██▊ | 83/300 [00:58<02:35, 1.40it/s, failures=0, objective=1]
28%|██▊ | 83/300 [00:58<02:35, 1.40it/s, failures=0, objective=1]
28%|██▊ | 84/300 [00:59<02:34, 1.40it/s, failures=0, objective=1]
28%|██▊ | 84/300 [00:59<02:34, 1.40it/s, failures=0, objective=1]
28%|██▊ | 85/300 [01:00<02:36, 1.37it/s, failures=0, objective=1]
28%|██▊ | 85/300 [01:00<02:36, 1.37it/s, failures=0, objective=1]
29%|██▊ | 86/300 [01:00<02:34, 1.38it/s, failures=0, objective=1]
29%|██▊ | 86/300 [01:00<02:34, 1.38it/s, failures=0, objective=1]
29%|██▉ | 87/300 [01:01<02:34, 1.38it/s, failures=0, objective=1]
29%|██▉ | 87/300 [01:01<02:34, 1.38it/s, failures=0, objective=1]
29%|██▉ | 88/300 [01:02<02:32, 1.39it/s, failures=0, objective=1]
29%|██▉ | 88/300 [01:02<02:32, 1.39it/s, failures=0, objective=1]
30%|██▉ | 89/300 [01:03<02:34, 1.36it/s, failures=0, objective=1]
30%|██▉ | 89/300 [01:03<02:34, 1.36it/s, failures=0, objective=1]
30%|███ | 90/300 [01:03<02:31, 1.38it/s, failures=0, objective=1]
30%|███ | 90/300 [01:03<02:31, 1.38it/s, failures=0, objective=1]
30%|███ | 91/300 [01:04<02:30, 1.39it/s, failures=0, objective=1]
30%|███ | 91/300 [01:04<02:30, 1.39it/s, failures=0, objective=1]
31%|███ | 92/300 [01:05<02:32, 1.37it/s, failures=0, objective=1]
31%|███ | 92/300 [01:05<02:32, 1.37it/s, failures=0, objective=1]
31%|███ | 93/300 [01:05<02:30, 1.38it/s, failures=0, objective=1]
31%|███ | 93/300 [01:05<02:30, 1.38it/s, failures=0, objective=1]
31%|███▏ | 94/300 [01:06<02:28, 1.39it/s, failures=0, objective=1]
31%|███▏ | 94/300 [01:06<02:28, 1.39it/s, failures=0, objective=1]
32%|███▏ | 95/300 [01:07<02:26, 1.40it/s, failures=0, objective=1]
32%|███▏ | 95/300 [01:07<02:26, 1.40it/s, failures=0, objective=1]
32%|███▏ | 96/300 [01:08<02:28, 1.37it/s, failures=0, objective=1]
32%|███▏ | 96/300 [01:08<02:28, 1.37it/s, failures=0, objective=1]
32%|███▏ | 97/300 [01:08<02:26, 1.38it/s, failures=0, objective=1]
32%|███▏ | 97/300 [01:08<02:26, 1.38it/s, failures=0, objective=1]
33%|███▎ | 98/300 [01:09<02:25, 1.39it/s, failures=0, objective=1]
33%|███▎ | 98/300 [01:09<02:25, 1.39it/s, failures=0, objective=1]
33%|███▎ | 99/300 [01:10<02:23, 1.40it/s, failures=0, objective=1]
33%|███▎ | 99/300 [01:10<02:23, 1.40it/s, failures=0, objective=1]
33%|███▎ | 100/300 [01:10<02:27, 1.36it/s, failures=0, objective=1]
33%|███▎ | 100/300 [01:10<02:27, 1.36it/s, failures=0, objective=1]Tuning selection model...
Tuned model parameters: {'bootstrap': False, 'max_depth': None, 'min_samples_leaf': 1, 'min_samples_split': 16, 'n_estimators': 100, 'splitter': 'random'}
Tuned model scores: {'r2': 0.616854946090871, 'r2_upper_bound': 0.563968797128797, 'y_std_corr': {'statistic': 0.5640805681606513, 'pvalue': 9.876830200563737e-10}}
34%|███▎ | 101/300 [01:20<10:42, 3.23s/it, failures=0, objective=1]
34%|███▎ | 101/300 [01:20<10:42, 3.23s/it, failures=0, objective=1]
34%|███▍ | 102/300 [01:20<08:09, 2.47s/it, failures=0, objective=1]
34%|███▍ | 102/300 [01:20<08:09, 2.47s/it, failures=0, objective=1]
34%|███▍ | 103/300 [01:21<06:26, 1.96s/it, failures=0, objective=1]
34%|███▍ | 103/300 [01:21<06:26, 1.96s/it, failures=0, objective=1]
35%|███▍ | 104/300 [01:22<05:10, 1.59s/it, failures=0, objective=1]
35%|███▍ | 104/300 [01:22<05:10, 1.59s/it, failures=0, objective=1]
35%|███▌ | 105/300 [01:22<04:17, 1.32s/it, failures=0, objective=1]
35%|███▌ | 105/300 [01:22<04:17, 1.32s/it, failures=0, objective=1]
35%|███▌ | 106/300 [01:23<03:39, 1.13s/it, failures=0, objective=1]
35%|███▌ | 106/300 [01:23<03:39, 1.13s/it, failures=0, objective=1]
36%|███▌ | 107/300 [01:24<03:16, 1.02s/it, failures=0, objective=1]
36%|███▌ | 107/300 [01:24<03:16, 1.02s/it, failures=0, objective=1]
36%|███▌ | 108/300 [01:25<02:57, 1.08it/s, failures=0, objective=1]
36%|███▌ | 108/300 [01:25<02:57, 1.08it/s, failures=0, objective=1]
36%|███▋ | 109/300 [01:25<02:44, 1.16it/s, failures=0, objective=1]
36%|███▋ | 109/300 [01:25<02:44, 1.16it/s, failures=0, objective=1]
37%|███▋ | 110/300 [01:26<02:37, 1.21it/s, failures=0, objective=1]
37%|███▋ | 110/300 [01:26<02:37, 1.21it/s, failures=0, objective=1]
37%|███▋ | 111/300 [01:27<02:28, 1.27it/s, failures=0, objective=1]
37%|███▋ | 111/300 [01:27<02:28, 1.27it/s, failures=0, objective=1]
37%|███▋ | 112/300 [01:27<02:23, 1.31it/s, failures=0, objective=1]
37%|███▋ | 112/300 [01:27<02:23, 1.31it/s, failures=0, objective=1]
38%|███▊ | 113/300 [01:28<02:18, 1.35it/s, failures=0, objective=1]
38%|███▊ | 113/300 [01:28<02:18, 1.35it/s, failures=0, objective=1]
38%|███▊ | 114/300 [01:29<02:19, 1.33it/s, failures=0, objective=1]
38%|███▊ | 114/300 [01:29<02:19, 1.33it/s, failures=0, objective=1]
38%|███▊ | 115/300 [01:30<02:15, 1.36it/s, failures=0, objective=1]
38%|███▊ | 115/300 [01:30<02:15, 1.36it/s, failures=0, objective=1]
39%|███▊ | 116/300 [01:30<02:12, 1.38it/s, failures=0, objective=1]
39%|███▊ | 116/300 [01:30<02:12, 1.38it/s, failures=0, objective=1]
39%|███▉ | 117/300 [01:31<02:11, 1.39it/s, failures=0, objective=1]
39%|███▉ | 117/300 [01:31<02:11, 1.39it/s, failures=0, objective=1]
39%|███▉ | 118/300 [01:32<02:14, 1.35it/s, failures=0, objective=1]
39%|███▉ | 118/300 [01:32<02:14, 1.35it/s, failures=0, objective=1]
40%|███▉ | 119/300 [01:32<02:12, 1.37it/s, failures=0, objective=1]
40%|███▉ | 119/300 [01:32<02:12, 1.37it/s, failures=0, objective=1]
40%|████ | 120/300 [01:33<02:10, 1.38it/s, failures=0, objective=1]
40%|████ | 120/300 [01:33<02:10, 1.38it/s, failures=0, objective=1]
40%|████ | 121/300 [01:34<02:07, 1.40it/s, failures=0, objective=1]
40%|████ | 121/300 [01:34<02:07, 1.40it/s, failures=0, objective=1]
41%|████ | 122/300 [01:35<02:09, 1.37it/s, failures=0, objective=1]
41%|████ | 122/300 [01:35<02:09, 1.37it/s, failures=0, objective=1]
41%|████ | 123/300 [01:35<02:07, 1.39it/s, failures=0, objective=1]
41%|████ | 123/300 [01:35<02:07, 1.39it/s, failures=0, objective=1]
41%|████▏ | 124/300 [01:36<02:05, 1.40it/s, failures=0, objective=1]
41%|████▏ | 124/300 [01:36<02:05, 1.40it/s, failures=0, objective=1]
42%|████▏ | 125/300 [01:37<02:08, 1.37it/s, failures=0, objective=1]
42%|████▏ | 125/300 [01:37<02:08, 1.37it/s, failures=0, objective=1]
42%|████▏ | 126/300 [01:38<02:05, 1.39it/s, failures=0, objective=1]
42%|████▏ | 126/300 [01:38<02:05, 1.39it/s, failures=0, objective=1]
42%|████▏ | 127/300 [01:38<02:03, 1.40it/s, failures=0, objective=1]
42%|████▏ | 127/300 [01:38<02:03, 1.40it/s, failures=0, objective=1]
43%|████▎ | 128/300 [01:39<02:02, 1.41it/s, failures=0, objective=1]
43%|████▎ | 128/300 [01:39<02:02, 1.41it/s, failures=0, objective=1]
43%|████▎ | 129/300 [01:40<02:04, 1.38it/s, failures=0, objective=1]
43%|████▎ | 129/300 [01:40<02:04, 1.38it/s, failures=0, objective=1]
43%|████▎ | 130/300 [01:40<02:02, 1.39it/s, failures=0, objective=1]
43%|████▎ | 130/300 [01:40<02:02, 1.39it/s, failures=0, objective=1]
44%|████▎ | 131/300 [01:41<02:00, 1.40it/s, failures=0, objective=1]
44%|████▎ | 131/300 [01:41<02:00, 1.40it/s, failures=0, objective=1]
44%|████▍ | 132/300 [01:42<01:58, 1.41it/s, failures=0, objective=1]
44%|████▍ | 132/300 [01:42<01:58, 1.41it/s, failures=0, objective=1]
44%|████▍ | 133/300 [01:43<02:01, 1.38it/s, failures=0, objective=1]
44%|████▍ | 133/300 [01:43<02:01, 1.38it/s, failures=0, objective=1]
45%|████▍ | 134/300 [01:43<01:59, 1.39it/s, failures=0, objective=1]
45%|████▍ | 134/300 [01:43<01:59, 1.39it/s, failures=0, objective=1]
45%|████▌ | 135/300 [01:44<01:58, 1.40it/s, failures=0, objective=1]
45%|████▌ | 135/300 [01:44<01:58, 1.40it/s, failures=0, objective=1]
45%|████▌ | 136/300 [01:45<01:56, 1.40it/s, failures=0, objective=1]
45%|████▌ | 136/300 [01:45<01:56, 1.40it/s, failures=0, objective=1]
46%|████▌ | 137/300 [01:45<01:58, 1.38it/s, failures=0, objective=1]
46%|████▌ | 137/300 [01:45<01:58, 1.38it/s, failures=0, objective=1]
46%|████▌ | 138/300 [01:46<01:56, 1.39it/s, failures=0, objective=1]
46%|████▌ | 138/300 [01:46<01:56, 1.39it/s, failures=0, objective=1]
46%|████▋ | 139/300 [01:47<01:55, 1.40it/s, failures=0, objective=1]
46%|████▋ | 139/300 [01:47<01:55, 1.40it/s, failures=0, objective=1]
47%|████▋ | 140/300 [01:48<01:56, 1.38it/s, failures=0, objective=1]
47%|████▋ | 140/300 [01:48<01:56, 1.38it/s, failures=0, objective=1]
47%|████▋ | 141/300 [01:48<01:53, 1.40it/s, failures=0, objective=1]
47%|████▋ | 141/300 [01:48<01:53, 1.40it/s, failures=0, objective=1]
47%|████▋ | 142/300 [01:49<01:52, 1.40it/s, failures=0, objective=1]
47%|████▋ | 142/300 [01:49<01:52, 1.40it/s, failures=0, objective=1]
48%|████▊ | 143/300 [01:50<01:51, 1.41it/s, failures=0, objective=1]
48%|████▊ | 143/300 [01:50<01:51, 1.41it/s, failures=0, objective=1]
48%|████▊ | 144/300 [01:50<01:52, 1.38it/s, failures=0, objective=1]
48%|████▊ | 144/300 [01:50<01:52, 1.38it/s, failures=0, objective=1]
48%|████▊ | 145/300 [01:51<01:51, 1.39it/s, failures=0, objective=1]
48%|████▊ | 145/300 [01:51<01:51, 1.39it/s, failures=0, objective=1]
49%|████▊ | 146/300 [01:52<01:49, 1.40it/s, failures=0, objective=1]
49%|████▊ | 146/300 [01:52<01:49, 1.40it/s, failures=0, objective=1]
49%|████▉ | 147/300 [01:53<01:51, 1.38it/s, failures=0, objective=1]
49%|████▉ | 147/300 [01:53<01:51, 1.38it/s, failures=0, objective=1]
49%|████▉ | 148/300 [01:53<01:49, 1.39it/s, failures=0, objective=1]
49%|████▉ | 148/300 [01:53<01:49, 1.39it/s, failures=0, objective=1]
50%|████▉ | 149/300 [01:54<01:47, 1.40it/s, failures=0, objective=1]
50%|████▉ | 149/300 [01:54<01:47, 1.40it/s, failures=0, objective=1]
50%|█████ | 150/300 [01:55<01:46, 1.41it/s, failures=0, objective=1]
50%|█████ | 150/300 [01:55<01:46, 1.41it/s, failures=0, objective=1]
50%|█████ | 151/300 [01:55<01:47, 1.38it/s, failures=0, objective=1]
50%|█████ | 151/300 [01:55<01:47, 1.38it/s, failures=0, objective=1]
51%|█████ | 152/300 [01:56<01:46, 1.39it/s, failures=0, objective=1]
51%|█████ | 152/300 [01:56<01:46, 1.39it/s, failures=0, objective=1]
51%|█████ | 153/300 [01:57<01:45, 1.40it/s, failures=0, objective=1]
51%|█████ | 153/300 [01:57<01:45, 1.40it/s, failures=0, objective=1]
51%|█████▏ | 154/300 [01:58<01:44, 1.40it/s, failures=0, objective=1]
51%|█████▏ | 154/300 [01:58<01:44, 1.40it/s, failures=0, objective=1]
52%|█████▏ | 155/300 [01:58<01:45, 1.37it/s, failures=0, objective=1]
52%|█████▏ | 155/300 [01:58<01:45, 1.37it/s, failures=0, objective=1]
52%|█████▏ | 156/300 [01:59<01:43, 1.39it/s, failures=0, objective=1]
52%|█████▏ | 156/300 [01:59<01:43, 1.39it/s, failures=0, objective=1]
52%|█████▏ | 157/300 [02:00<01:41, 1.40it/s, failures=0, objective=1]
52%|█████▏ | 157/300 [02:00<01:41, 1.40it/s, failures=0, objective=1]
53%|█████▎ | 158/300 [02:00<01:41, 1.40it/s, failures=0, objective=1]
53%|█████▎ | 158/300 [02:00<01:41, 1.40it/s, failures=0, objective=1]
53%|█████▎ | 159/300 [02:01<01:42, 1.37it/s, failures=0, objective=1]
53%|█████▎ | 159/300 [02:01<01:42, 1.37it/s, failures=0, objective=1]
53%|█████▎ | 160/300 [02:02<01:40, 1.39it/s, failures=0, objective=1]
53%|█████▎ | 160/300 [02:02<01:40, 1.39it/s, failures=0, objective=1]
54%|█████▎ | 161/300 [02:03<01:39, 1.40it/s, failures=0, objective=1]
54%|█████▎ | 161/300 [02:03<01:39, 1.40it/s, failures=0, objective=1]
54%|█████▍ | 162/300 [02:03<01:37, 1.41it/s, failures=0, objective=1]
54%|█████▍ | 162/300 [02:03<01:37, 1.41it/s, failures=0, objective=1]
54%|█████▍ | 163/300 [02:04<01:39, 1.38it/s, failures=0, objective=1]
54%|█████▍ | 163/300 [02:04<01:39, 1.38it/s, failures=0, objective=1]
55%|█████▍ | 164/300 [02:05<01:36, 1.40it/s, failures=0, objective=1]
55%|█████▍ | 164/300 [02:05<01:36, 1.40it/s, failures=0, objective=1]
55%|█████▌ | 165/300 [02:05<01:35, 1.41it/s, failures=0, objective=1]
55%|█████▌ | 165/300 [02:05<01:35, 1.41it/s, failures=0, objective=1]
55%|█████▌ | 166/300 [02:06<01:37, 1.37it/s, failures=0, objective=1]
55%|█████▌ | 166/300 [02:06<01:37, 1.37it/s, failures=0, objective=1]
56%|█████▌ | 167/300 [02:07<01:35, 1.39it/s, failures=0, objective=1]
56%|█████▌ | 167/300 [02:07<01:35, 1.39it/s, failures=0, objective=1]
56%|█████▌ | 168/300 [02:08<01:34, 1.40it/s, failures=0, objective=1]
56%|█████▌ | 168/300 [02:08<01:34, 1.40it/s, failures=0, objective=1]
56%|█████▋ | 169/300 [02:08<01:32, 1.41it/s, failures=0, objective=1]
56%|█████▋ | 169/300 [02:08<01:32, 1.41it/s, failures=0, objective=1]
57%|█████▋ | 170/300 [02:09<01:33, 1.38it/s, failures=0, objective=1]
57%|█████▋ | 170/300 [02:09<01:33, 1.38it/s, failures=0, objective=1]
57%|█████▋ | 171/300 [02:10<01:32, 1.40it/s, failures=0, objective=1]
57%|█████▋ | 171/300 [02:10<01:32, 1.40it/s, failures=0, objective=1]
57%|█████▋ | 172/300 [02:10<01:31, 1.40it/s, failures=0, objective=1]
57%|█████▋ | 172/300 [02:10<01:31, 1.40it/s, failures=0, objective=1]
58%|█████▊ | 173/300 [02:11<01:30, 1.41it/s, failures=0, objective=1]
58%|█████▊ | 173/300 [02:11<01:30, 1.41it/s, failures=0, objective=1]
58%|█████▊ | 174/300 [02:12<01:31, 1.38it/s, failures=0, objective=1]
58%|█████▊ | 174/300 [02:12<01:31, 1.38it/s, failures=0, objective=1]
58%|█████▊ | 175/300 [02:13<01:29, 1.40it/s, failures=0, objective=1]
58%|█████▊ | 175/300 [02:13<01:29, 1.40it/s, failures=0, objective=1]
59%|█████▊ | 176/300 [02:13<01:27, 1.41it/s, failures=0, objective=1]
59%|█████▊ | 176/300 [02:13<01:27, 1.41it/s, failures=0, objective=1]
59%|█████▉ | 177/300 [02:14<01:27, 1.41it/s, failures=0, objective=1]
59%|█████▉ | 177/300 [02:14<01:27, 1.41it/s, failures=0, objective=1]
59%|█████▉ | 178/300 [02:15<01:27, 1.39it/s, failures=0, objective=1]
59%|█████▉ | 178/300 [02:15<01:27, 1.39it/s, failures=0, objective=1]
60%|█████▉ | 179/300 [02:15<01:26, 1.40it/s, failures=0, objective=1]
60%|█████▉ | 179/300 [02:15<01:26, 1.40it/s, failures=0, objective=1]
60%|██████ | 180/300 [02:16<01:25, 1.41it/s, failures=0, objective=1]
60%|██████ | 180/300 [02:16<01:25, 1.41it/s, failures=0, objective=1]
60%|██████ | 181/300 [02:17<01:26, 1.38it/s, failures=0, objective=1]
60%|██████ | 181/300 [02:17<01:26, 1.38it/s, failures=0, objective=1]
61%|██████ | 182/300 [02:18<01:24, 1.40it/s, failures=0, objective=1]
61%|██████ | 182/300 [02:18<01:24, 1.40it/s, failures=0, objective=1]
61%|██████ | 183/300 [02:18<01:23, 1.41it/s, failures=0, objective=1]
61%|██████ | 183/300 [02:18<01:23, 1.41it/s, failures=0, objective=1]
61%|██████▏ | 184/300 [02:19<01:21, 1.42it/s, failures=0, objective=1]
61%|██████▏ | 184/300 [02:19<01:21, 1.42it/s, failures=0, objective=1]
62%|██████▏ | 185/300 [02:20<01:23, 1.38it/s, failures=0, objective=1]
62%|██████▏ | 185/300 [02:20<01:23, 1.38it/s, failures=0, objective=1]
62%|██████▏ | 186/300 [02:21<01:21, 1.39it/s, failures=0, objective=1]
62%|██████▏ | 186/300 [02:21<01:21, 1.39it/s, failures=0, objective=1]
62%|██████▏ | 187/300 [02:21<01:20, 1.40it/s, failures=0, objective=1]
62%|██████▏ | 187/300 [02:21<01:20, 1.40it/s, failures=0, objective=1]
63%|██████▎ | 188/300 [02:22<01:19, 1.40it/s, failures=0, objective=1]
63%|██████▎ | 188/300 [02:22<01:19, 1.40it/s, failures=0, objective=1]
63%|██████▎ | 189/300 [02:23<01:20, 1.38it/s, failures=0, objective=1]
63%|██████▎ | 189/300 [02:23<01:20, 1.38it/s, failures=0, objective=1]
63%|██████▎ | 190/300 [02:23<01:18, 1.39it/s, failures=0, objective=1]
63%|██████▎ | 190/300 [02:23<01:18, 1.39it/s, failures=0, objective=1]
64%|██████▎ | 191/300 [02:24<01:17, 1.41it/s, failures=0, objective=1]
64%|██████▎ | 191/300 [02:24<01:17, 1.41it/s, failures=0, objective=1]
64%|██████▍ | 192/300 [02:25<01:16, 1.41it/s, failures=0, objective=1]
64%|██████▍ | 192/300 [02:25<01:16, 1.41it/s, failures=0, objective=1]
64%|██████▍ | 193/300 [02:26<01:17, 1.38it/s, failures=0, objective=1]
64%|██████▍ | 193/300 [02:26<01:17, 1.38it/s, failures=0, objective=1]
65%|██████▍ | 194/300 [02:26<01:15, 1.40it/s, failures=0, objective=1]
65%|██████▍ | 194/300 [02:26<01:15, 1.40it/s, failures=0, objective=1]
65%|██████▌ | 195/300 [02:27<01:14, 1.41it/s, failures=0, objective=1]
65%|██████▌ | 195/300 [02:27<01:14, 1.41it/s, failures=0, objective=1]
65%|██████▌ | 196/300 [02:28<01:14, 1.39it/s, failures=0, objective=1]
65%|██████▌ | 196/300 [02:28<01:14, 1.39it/s, failures=0, objective=1]
66%|██████▌ | 197/300 [02:28<01:13, 1.40it/s, failures=0, objective=1]
66%|██████▌ | 197/300 [02:28<01:13, 1.40it/s, failures=0, objective=1]
66%|██████▌ | 198/300 [02:29<01:12, 1.41it/s, failures=0, objective=1]
66%|██████▌ | 198/300 [02:29<01:12, 1.41it/s, failures=0, objective=1]
66%|██████▋ | 199/300 [02:30<01:11, 1.41it/s, failures=0, objective=1]
66%|██████▋ | 199/300 [02:30<01:11, 1.41it/s, failures=0, objective=1]
67%|██████▋ | 200/300 [02:31<01:12, 1.38it/s, failures=0, objective=1]
67%|██████▋ | 200/300 [02:31<01:12, 1.38it/s, failures=0, objective=1]Tuning selection model...
Tuned model parameters: {'bootstrap': True, 'max_depth': None, 'min_samples_leaf': 1, 'min_samples_split': 16, 'n_estimators': 100, 'splitter': 'random'}
Tuned model scores: {'r2': 0.5364447759757613, 'r2_upper_bound': 0.5281183982243103, 'y_std_corr': {'statistic': 0.5169270064934015, 'pvalue': 4.6412103962294715e-15}}
67%|██████▋ | 201/300 [02:44<07:24, 4.49s/it, failures=0, objective=1]
67%|██████▋ | 201/300 [02:44<07:24, 4.49s/it, failures=0, objective=1]
67%|██████▋ | 202/300 [02:45<05:29, 3.36s/it, failures=0, objective=1]
67%|██████▋ | 202/300 [02:45<05:29, 3.36s/it, failures=0, objective=1]
68%|██████▊ | 203/300 [02:45<04:10, 2.58s/it, failures=0, objective=1]
68%|██████▊ | 203/300 [02:45<04:10, 2.58s/it, failures=0, objective=1]
68%|██████▊ | 204/300 [02:46<03:14, 2.02s/it, failures=0, objective=1]
68%|██████▊ | 204/300 [02:46<03:14, 2.02s/it, failures=0, objective=1]
68%|██████▊ | 205/300 [02:47<02:35, 1.63s/it, failures=0, objective=1]
68%|██████▊ | 205/300 [02:47<02:35, 1.63s/it, failures=0, objective=1]
69%|██████▊ | 206/300 [02:48<02:09, 1.37s/it, failures=0, objective=1]
69%|██████▊ | 206/300 [02:48<02:09, 1.37s/it, failures=0, objective=1]
69%|██████▉ | 207/300 [02:48<01:49, 1.18s/it, failures=0, objective=1]
69%|██████▉ | 207/300 [02:48<01:49, 1.18s/it, failures=0, objective=1]
69%|██████▉ | 208/300 [02:49<01:35, 1.04s/it, failures=0, objective=1]
69%|██████▉ | 208/300 [02:49<01:35, 1.04s/it, failures=0, objective=1]
70%|██████▉ | 209/300 [02:50<01:25, 1.06it/s, failures=0, objective=1]
70%|██████▉ | 209/300 [02:50<01:25, 1.06it/s, failures=0, objective=1]
70%|███████ | 210/300 [02:50<01:20, 1.12it/s, failures=0, objective=1]
70%|███████ | 210/300 [02:50<01:20, 1.12it/s, failures=0, objective=1]
70%|███████ | 211/300 [02:51<01:14, 1.19it/s, failures=0, objective=1]
70%|███████ | 211/300 [02:51<01:14, 1.19it/s, failures=0, objective=1]
71%|███████ | 212/300 [02:52<01:10, 1.25it/s, failures=0, objective=1]
71%|███████ | 212/300 [02:52<01:10, 1.25it/s, failures=0, objective=1]
71%|███████ | 213/300 [02:53<01:07, 1.29it/s, failures=0, objective=1]
71%|███████ | 213/300 [02:53<01:07, 1.29it/s, failures=0, objective=1]
71%|███████▏ | 214/300 [02:53<01:06, 1.29it/s, failures=0, objective=1]
71%|███████▏ | 214/300 [02:53<01:06, 1.29it/s, failures=0, objective=1]
72%|███████▏ | 215/300 [02:54<01:04, 1.32it/s, failures=0, objective=1]
72%|███████▏ | 215/300 [02:54<01:04, 1.32it/s, failures=0, objective=1]
72%|███████▏ | 216/300 [02:55<01:02, 1.34it/s, failures=0, objective=1]
72%|███████▏ | 216/300 [02:55<01:02, 1.34it/s, failures=0, objective=1]
72%|███████▏ | 217/300 [02:56<01:01, 1.36it/s, failures=0, objective=1]
72%|███████▏ | 217/300 [02:56<01:01, 1.36it/s, failures=0, objective=1]
73%|███████▎ | 218/300 [02:56<01:01, 1.34it/s, failures=0, objective=1]
73%|███████▎ | 218/300 [02:56<01:01, 1.34it/s, failures=0, objective=1]
73%|███████▎ | 219/300 [02:57<00:59, 1.36it/s, failures=0, objective=1]
73%|███████▎ | 219/300 [02:57<00:59, 1.36it/s, failures=0, objective=1]
73%|███████▎ | 220/300 [02:58<00:58, 1.37it/s, failures=0, objective=1]
73%|███████▎ | 220/300 [02:58<00:58, 1.37it/s, failures=0, objective=1]
74%|███████▎ | 221/300 [02:58<00:57, 1.38it/s, failures=0, objective=1]
74%|███████▎ | 221/300 [02:58<00:57, 1.38it/s, failures=0, objective=1]
74%|███████▍ | 222/300 [02:59<00:57, 1.35it/s, failures=0, objective=1]
74%|███████▍ | 222/300 [02:59<00:57, 1.35it/s, failures=0, objective=1]
74%|███████▍ | 223/300 [03:00<00:56, 1.36it/s, failures=0, objective=1]
74%|███████▍ | 223/300 [03:00<00:56, 1.36it/s, failures=0, objective=1]
75%|███████▍ | 224/300 [03:01<00:55, 1.37it/s, failures=0, objective=1]
75%|███████▍ | 224/300 [03:01<00:55, 1.37it/s, failures=0, objective=1]
75%|███████▌ | 225/300 [03:01<00:54, 1.38it/s, failures=0, objective=1]
75%|███████▌ | 225/300 [03:01<00:54, 1.38it/s, failures=0, objective=1]
75%|███████▌ | 226/300 [03:02<00:54, 1.35it/s, failures=0, objective=1]
75%|███████▌ | 226/300 [03:02<00:54, 1.35it/s, failures=0, objective=1]
76%|███████▌ | 227/300 [03:03<00:53, 1.37it/s, failures=0, objective=1]
76%|███████▌ | 227/300 [03:03<00:53, 1.37it/s, failures=0, objective=1]
76%|███████▌ | 228/300 [03:04<00:52, 1.38it/s, failures=0, objective=1]
76%|███████▌ | 228/300 [03:04<00:52, 1.38it/s, failures=0, objective=1]
76%|███████▋ | 229/300 [03:04<00:52, 1.36it/s, failures=0, objective=1]
76%|███████▋ | 229/300 [03:04<00:52, 1.36it/s, failures=0, objective=1]
77%|███████▋ | 230/300 [03:05<00:51, 1.37it/s, failures=0, objective=1]
77%|███████▋ | 230/300 [03:05<00:51, 1.37it/s, failures=0, objective=1]
77%|███████▋ | 231/300 [03:06<00:50, 1.38it/s, failures=0, objective=1]
77%|███████▋ | 231/300 [03:06<00:50, 1.38it/s, failures=0, objective=1]
77%|███████▋ | 232/300 [03:06<00:49, 1.38it/s, failures=0, objective=1]
77%|███████▋ | 232/300 [03:06<00:49, 1.38it/s, failures=0, objective=1]
78%|███████▊ | 233/300 [03:07<00:49, 1.36it/s, failures=0, objective=1]
78%|███████▊ | 233/300 [03:07<00:49, 1.36it/s, failures=0, objective=1]
78%|███████▊ | 234/300 [03:08<00:48, 1.37it/s, failures=0, objective=1]
78%|███████▊ | 234/300 [03:08<00:48, 1.37it/s, failures=0, objective=1]
78%|███████▊ | 235/300 [03:09<00:47, 1.38it/s, failures=0, objective=1]
78%|███████▊ | 235/300 [03:09<00:47, 1.38it/s, failures=0, objective=1]
79%|███████▊ | 236/300 [03:09<00:46, 1.38it/s, failures=0, objective=1]
79%|███████▊ | 236/300 [03:09<00:46, 1.38it/s, failures=0, objective=1]
79%|███████▉ | 237/300 [03:10<00:46, 1.35it/s, failures=0, objective=1]
79%|███████▉ | 237/300 [03:10<00:46, 1.35it/s, failures=0, objective=1]
79%|███████▉ | 238/300 [03:11<00:45, 1.37it/s, failures=0, objective=1]
79%|███████▉ | 238/300 [03:11<00:45, 1.37it/s, failures=0, objective=1]
80%|███████▉ | 239/300 [03:12<00:44, 1.38it/s, failures=0, objective=1]
80%|███████▉ | 239/300 [03:12<00:44, 1.38it/s, failures=0, objective=1]
80%|████████ | 240/300 [03:12<00:43, 1.38it/s, failures=0, objective=1]
80%|████████ | 240/300 [03:12<00:43, 1.38it/s, failures=0, objective=1]
80%|████████ | 241/300 [03:13<00:43, 1.36it/s, failures=0, objective=1]
80%|████████ | 241/300 [03:13<00:43, 1.36it/s, failures=0, objective=1]
81%|████████ | 242/300 [03:14<00:42, 1.37it/s, failures=0, objective=1]
81%|████████ | 242/300 [03:14<00:42, 1.37it/s, failures=0, objective=1]
81%|████████ | 243/300 [03:14<00:41, 1.38it/s, failures=0, objective=1]
81%|████████ | 243/300 [03:14<00:41, 1.38it/s, failures=0, objective=1]
81%|████████▏ | 244/300 [03:15<00:40, 1.38it/s, failures=0, objective=1]
81%|████████▏ | 244/300 [03:15<00:40, 1.38it/s, failures=0, objective=1]
82%|████████▏ | 245/300 [03:16<00:40, 1.35it/s, failures=0, objective=1]
82%|████████▏ | 245/300 [03:16<00:40, 1.35it/s, failures=0, objective=1]
82%|████████▏ | 246/300 [03:17<00:39, 1.37it/s, failures=0, objective=1]
82%|████████▏ | 246/300 [03:17<00:39, 1.37it/s, failures=0, objective=1]
82%|████████▏ | 247/300 [03:17<00:38, 1.38it/s, failures=0, objective=1]
82%|████████▏ | 247/300 [03:17<00:38, 1.38it/s, failures=0, objective=1]
83%|████████▎ | 248/300 [03:18<00:37, 1.39it/s, failures=0, objective=1]
83%|████████▎ | 248/300 [03:18<00:37, 1.39it/s, failures=0, objective=1]
83%|████████▎ | 249/300 [03:19<00:37, 1.36it/s, failures=0, objective=1]
83%|████████▎ | 249/300 [03:19<00:37, 1.36it/s, failures=0, objective=1]
83%|████████▎ | 250/300 [03:20<00:36, 1.37it/s, failures=0, objective=1]
83%|████████▎ | 250/300 [03:20<00:36, 1.37it/s, failures=0, objective=1]
84%|████████▎ | 251/300 [03:20<00:35, 1.38it/s, failures=0, objective=1]
84%|████████▎ | 251/300 [03:20<00:35, 1.38it/s, failures=0, objective=1]
84%|████████▍ | 252/300 [03:21<00:35, 1.36it/s, failures=0, objective=1]
84%|████████▍ | 252/300 [03:21<00:35, 1.36it/s, failures=0, objective=1]
84%|████████▍ | 253/300 [03:22<00:34, 1.37it/s, failures=0, objective=1]
84%|████████▍ | 253/300 [03:22<00:34, 1.37it/s, failures=0, objective=1]
85%|████████▍ | 254/300 [03:22<00:33, 1.38it/s, failures=0, objective=1]
85%|████████▍ | 254/300 [03:22<00:33, 1.38it/s, failures=0, objective=1]
85%|████████▌ | 255/300 [03:23<00:32, 1.39it/s, failures=0, objective=1]
85%|████████▌ | 255/300 [03:23<00:32, 1.39it/s, failures=0, objective=1]
85%|████████▌ | 256/300 [03:24<00:32, 1.36it/s, failures=0, objective=1]
85%|████████▌ | 256/300 [03:24<00:32, 1.36it/s, failures=0, objective=1]
86%|████████▌ | 257/300 [03:25<00:31, 1.37it/s, failures=0, objective=1]
86%|████████▌ | 257/300 [03:25<00:31, 1.37it/s, failures=0, objective=1]
86%|████████▌ | 258/300 [03:25<00:30, 1.38it/s, failures=0, objective=1]
86%|████████▌ | 258/300 [03:25<00:30, 1.38it/s, failures=0, objective=1]
86%|████████▋ | 259/300 [03:26<00:29, 1.38it/s, failures=0, objective=1]
86%|████████▋ | 259/300 [03:26<00:29, 1.38it/s, failures=0, objective=1]
87%|████████▋ | 260/300 [03:27<00:29, 1.36it/s, failures=0, objective=1]
87%|████████▋ | 260/300 [03:27<00:29, 1.36it/s, failures=0, objective=1]
87%|████████▋ | 261/300 [03:28<00:28, 1.37it/s, failures=0, objective=1]
87%|████████▋ | 261/300 [03:28<00:28, 1.37it/s, failures=0, objective=1]
87%|████████▋ | 262/300 [03:28<00:27, 1.38it/s, failures=0, objective=1]
87%|████████▋ | 262/300 [03:28<00:27, 1.38it/s, failures=0, objective=1]
88%|████████▊ | 263/300 [03:29<00:26, 1.39it/s, failures=0, objective=1]
88%|████████▊ | 263/300 [03:29<00:26, 1.39it/s, failures=0, objective=1]
88%|████████▊ | 264/300 [03:30<00:26, 1.36it/s, failures=0, objective=1]
88%|████████▊ | 264/300 [03:30<00:26, 1.36it/s, failures=0, objective=1]
88%|████████▊ | 265/300 [03:31<00:25, 1.37it/s, failures=0, objective=1]
88%|████████▊ | 265/300 [03:31<00:25, 1.37it/s, failures=0, objective=1]
89%|████████▊ | 266/300 [03:31<00:24, 1.38it/s, failures=0, objective=1]
89%|████████▊ | 266/300 [03:31<00:24, 1.38it/s, failures=0, objective=1]
89%|████████▉ | 267/300 [03:32<00:23, 1.38it/s, failures=0, objective=1]
89%|████████▉ | 267/300 [03:32<00:23, 1.38it/s, failures=0, objective=1]
89%|████████▉ | 268/300 [03:33<00:23, 1.36it/s, failures=0, objective=1]
89%|████████▉ | 268/300 [03:33<00:23, 1.36it/s, failures=0, objective=1]
90%|████████▉ | 269/300 [03:33<00:22, 1.36it/s, failures=0, objective=1]
90%|████████▉ | 269/300 [03:33<00:22, 1.36it/s, failures=0, objective=1]
90%|█████████ | 270/300 [03:34<00:22, 1.36it/s, failures=0, objective=1]
90%|█████████ | 270/300 [03:34<00:22, 1.36it/s, failures=0, objective=1]
90%|█████████ | 271/300 [03:35<00:21, 1.37it/s, failures=0, objective=1]
90%|█████████ | 271/300 [03:35<00:21, 1.37it/s, failures=0, objective=1]
91%|█████████ | 272/300 [03:36<00:20, 1.34it/s, failures=0, objective=1]
91%|█████████ | 272/300 [03:36<00:20, 1.34it/s, failures=0, objective=1]
91%|█████████ | 273/300 [03:36<00:19, 1.36it/s, failures=0, objective=1]
91%|█████████ | 273/300 [03:36<00:19, 1.36it/s, failures=0, objective=1]
91%|█████████▏| 274/300 [03:37<00:18, 1.37it/s, failures=0, objective=1]
91%|█████████▏| 274/300 [03:37<00:18, 1.37it/s, failures=0, objective=1]
92%|█████████▏| 275/300 [03:38<00:17, 1.39it/s, failures=0, objective=1]
92%|█████████▏| 275/300 [03:38<00:17, 1.39it/s, failures=0, objective=1]
92%|█████████▏| 276/300 [03:39<00:17, 1.36it/s, failures=0, objective=1]
92%|█████████▏| 276/300 [03:39<00:17, 1.36it/s, failures=0, objective=1]
92%|█████████▏| 277/300 [03:39<00:16, 1.37it/s, failures=0, objective=1]
92%|█████████▏| 277/300 [03:39<00:16, 1.37it/s, failures=0, objective=1]
93%|█████████▎| 278/300 [03:40<00:15, 1.38it/s, failures=0, objective=1]
93%|█████████▎| 278/300 [03:40<00:15, 1.38it/s, failures=0, objective=1]
93%|█████████▎| 279/300 [03:41<00:15, 1.35it/s, failures=0, objective=1]
93%|█████████▎| 279/300 [03:41<00:15, 1.35it/s, failures=0, objective=1]
93%|█████████▎| 280/300 [03:42<00:14, 1.36it/s, failures=0, objective=1]
93%|█████████▎| 280/300 [03:42<00:14, 1.36it/s, failures=0, objective=1]
94%|█████████▎| 281/300 [03:42<00:13, 1.37it/s, failures=0, objective=1]
94%|█████████▎| 281/300 [03:42<00:13, 1.37it/s, failures=0, objective=1]
94%|█████████▍| 282/300 [03:43<00:13, 1.38it/s, failures=0, objective=1]
94%|█████████▍| 282/300 [03:43<00:13, 1.38it/s, failures=0, objective=1]
94%|█████████▍| 283/300 [03:44<00:12, 1.36it/s, failures=0, objective=1]
94%|█████████▍| 283/300 [03:44<00:12, 1.36it/s, failures=0, objective=1]
95%|█████████▍| 284/300 [03:44<00:11, 1.37it/s, failures=0, objective=1]
95%|█████████▍| 284/300 [03:44<00:11, 1.37it/s, failures=0, objective=1]
95%|█████████▌| 285/300 [03:45<00:10, 1.37it/s, failures=0, objective=1]
95%|█████████▌| 285/300 [03:45<00:10, 1.37it/s, failures=0, objective=1]
95%|█████████▌| 286/300 [03:46<00:10, 1.39it/s, failures=0, objective=1]
95%|█████████▌| 286/300 [03:46<00:10, 1.39it/s, failures=0, objective=1]
96%|█████████▌| 287/300 [03:47<00:09, 1.36it/s, failures=0, objective=1]
96%|█████████▌| 287/300 [03:47<00:09, 1.36it/s, failures=0, objective=1]
96%|█████████▌| 288/300 [03:47<00:08, 1.37it/s, failures=0, objective=1]
96%|█████████▌| 288/300 [03:47<00:08, 1.37it/s, failures=0, objective=1]
96%|█████████▋| 289/300 [03:48<00:07, 1.38it/s, failures=0, objective=1]
96%|█████████▋| 289/300 [03:48<00:07, 1.38it/s, failures=0, objective=1]
97%|█████████▋| 290/300 [03:49<00:07, 1.36it/s, failures=0, objective=1]
97%|█████████▋| 290/300 [03:49<00:07, 1.36it/s, failures=0, objective=1]
97%|█████████▋| 291/300 [03:50<00:06, 1.37it/s, failures=0, objective=1]
97%|█████████▋| 291/300 [03:50<00:06, 1.37it/s, failures=0, objective=1]
97%|█████████▋| 292/300 [03:50<00:05, 1.38it/s, failures=0, objective=1]
97%|█████████▋| 292/300 [03:50<00:05, 1.38it/s, failures=0, objective=1]
98%|█████████▊| 293/300 [03:51<00:05, 1.39it/s, failures=0, objective=1]
98%|█████████▊| 293/300 [03:51<00:05, 1.39it/s, failures=0, objective=1]
98%|█████████▊| 294/300 [03:52<00:04, 1.35it/s, failures=0, objective=1]
98%|█████████▊| 294/300 [03:52<00:04, 1.35it/s, failures=0, objective=1]
98%|█████████▊| 295/300 [03:52<00:03, 1.37it/s, failures=0, objective=1]
98%|█████████▊| 295/300 [03:52<00:03, 1.37it/s, failures=0, objective=1]
99%|█████████▊| 296/300 [03:53<00:02, 1.38it/s, failures=0, objective=1]
99%|█████████▊| 296/300 [03:53<00:02, 1.38it/s, failures=0, objective=1]
99%|█████████▉| 297/300 [03:54<00:02, 1.39it/s, failures=0, objective=1]
99%|█████████▉| 297/300 [03:54<00:02, 1.39it/s, failures=0, objective=1]
99%|█████████▉| 298/300 [03:55<00:01, 1.36it/s, failures=0, objective=1]
99%|█████████▉| 298/300 [03:55<00:01, 1.36it/s, failures=0, objective=1]
100%|█████████▉| 299/300 [03:55<00:00, 1.38it/s, failures=0, objective=1]
100%|█████████▉| 299/300 [03:55<00:00, 1.38it/s, failures=0, objective=1]
100%|██████████| 300/300 [03:56<00:00, 1.39it/s, failures=0, objective=1]
100%|██████████| 300/300 [03:56<00:00, 1.39it/s, failures=0, objective=1]
100%|██████████| 300/300 [03:56<00:00, 1.27it/s, failures=0, objective=1]
Tuning selection model...
Tuned model parameters: {'bootstrap': True, 'max_depth': None, 'min_samples_leaf': 1, 'min_samples_split': 16, 'n_estimators': 100, 'splitter': 'random'}
Tuned model scores: {'r2': 0.5758640399372144, 'r2_upper_bound': 0.5824243393398307, 'y_std_corr': {'statistic': 0.5507077171258088, 'pvalue': 3.4360452071374125e-25}}
Finally, let us visualize the results. The search(...) returns a DataFrame also saved locally under results.csv (in case of crash we don’t want to lose the possibly expensive evaluations already performed).
The DataFrame contains the usual columns:
the optimized hyperparameters: such as \(x\) with name
p:x.the
objectivemaximised which directly match the results of the \(f\) function in our example.the
job_idof each evaluated function (increased incrementally following the order of created evaluations).the time of creation/collection of each task
timestamp_submitandtimestamp_gatherrespectively (in secondes, since the creation of the Evaluator).
In addition, it now also contains the new columns:
1. the estimated solution parameter sol.p:x.
2. the estimated solution objective sol.objective.
3. the estimated solution objective aleatoric uncertainty sol.objective_std_al.
4. the estimated solution objective epistemic uncertainty sol.objective_std_ep.
To get the parameters at the observed maximum value we can use the deephyper.analysis.hpo.parameters_at_max():
We make sure to select the right column and prefix for parameters.
Also, we prefer to select the solution amoung the n_last=20 rows to avoid selecting noisy observations at the beginning.
from deephyper.analysis.hpo import parameters_at_max
parameters, objective = parameters_at_max(results, column="sol.objective", prefix="sol.p:", n_last=20)
print("\nEstimated Optimum values")
print("x:", parameters["x"])
print("objective:", objective)
Estimated Optimum values
x: 0.28415316302867666
objective: 1.0
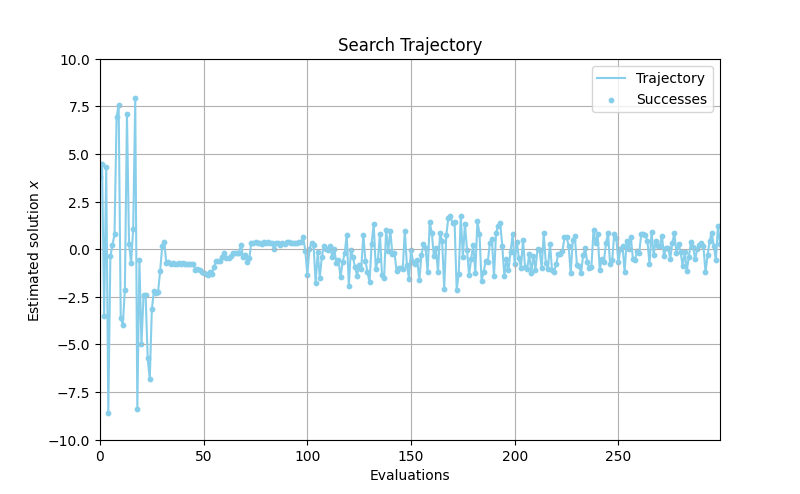
We can also plot the evolution of the estimated solution value of \(x\) to verify that we converge correctly toward \(x=0\).
import matplotlib.pyplot as plt
from deephyper.analysis.hpo import plot_search_trajectory_single_objective_hpo
WIDTH_PLOTS = 8
HEIGHT_PLOTS = WIDTH_PLOTS / 1.618
fig, ax = plt.subplots(figsize=(WIDTH_PLOTS, HEIGHT_PLOTS))
plot_search_trajectory_single_objective_hpo(results, column="sol.p:x", mode="max", ax=ax)
_ = ax.set_ylabel(r"Estimated solution $x$")
_ = ax.set_ylim(-10, 10)
_ = plt.title("Search Trajectory")
Total running time of the script: (4 minutes 13.660 seconds)